













ĐỘNG CƠ DC JGA25-310 12V 100RPM, ĐỘNG CƠ GIẢM TỐC


85.000 ₫
Động cơ DC JGA25-310 12V 100RPM là Motor có cấu tạo bằng kim loại cho độ bền và độ ổn định cao, được sử dụng trong các mô hình robot, xe, thuyền
| Điện áp hoạt động: | 12V |
| Dòng tiêu thụ: | 100mA |
| Công suất: | 3W |
| Loại sản phẩm: | IC Rời |
| Chuẩn giao tiếp: | Digital (D0) |
5 in stock
Giới thiệu động cơ DC JGA25-310 12V 100RPM
Động cơ DC JGA25-310 12V 100RPM là Motor có cấu tạo bằng kim loại cho độ bền và độ ổn định cao, được sử dụng trong các mô hình robot, xe, thuyền,…, hộp giảm tốc của động cơ có nhiều tỉ số truyền giúp bạn dễ dàng lựa chọn giữa lực kéo và tốc độ (lực kéo càng lớn thì tốc độ càng chậm và ngược lại), động cơ sử dụng nguyên liệu chất lượng cao (lõi dây đồng nguyên chất, lá thép 407, vòng tiếp xúc niken, nam châm từ tính mạnh,…) cho sức mạnh và độ bền vượt trội hơn các loại giá rẻ trên thị trường hiện nay (sử dụng lõi dây nhôm, nam châm từ tính yếu).
Động cơ DC JGA25-310 12V 100RPM thường được sử dụng trong các ứng dụng cần xác định tốc độ, vị trí, chiều quay của động cơ DC: Robot mê cung, robot xe hai bánh tự cân bằng,…
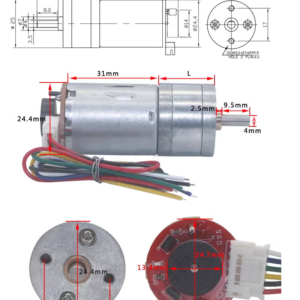
Thông số cơ bản động cơ :
- Mode: JGA25-310
- Điện áp cấp cho động cơ hoạt động: 12VDC
- Dòng điện không tải: 100mA
- Dòng chịu đựng tối đa khi có tải: 1A
- Công suất: 3W
- Tỉ số truyền: 103:1
- Tốc độ sau giảm tốc: 100RPM
- Tốc độ chịu đựng tối đa khi có tải: 30RPM
- Lực kéo Moment định mức: 1.2KG.CM
- Lực léo Moment tối đa: 1.5KG.CM
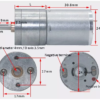
- Loại trục: Chữ D
- Đường kính động cơ: 25mm
- Đường kính trục: 4mm
- Trọng lượng: 70g
Ứng dụng động cơ DC JGA25-310 12V 100RPM
- Thiết bị điện dân dụng: Các loại thiết bị như quạt trần, máy lạnh, máy giặt, máy hút bụi đều được trang bị các khối động cơ điện 1 chiều cỡ nhỏ
- Đồ chơi trẻ em: Các loại đồ chơi trẻ em như oto, máy bay, máy xúc, điều khiển từ xa các thiết bị có khả năng chuyển động đều sử dụng động cơ 1 chiều DC
- Thiết bị điện tử: Đối với các hệ thống, thiết bị điện tử người ta cũng sử dụng động cơ điện 1 chiều như 1 phần của hệ thống đó. Chúng ta có thể bắt gặp loại động cơ này bên trong quạt tản nhiệt, ổ cứng, ổ quang, tản nhiệt nước,…
- Phương tiện, máy móc: Không chỉ những loại thiết bị nhỏ, mà động cơ điện 1 chiều còn được sử dụng làm động cơ chính cho các loại máy móc, thiết bị như: , xe đạp điện, xe máy điện,…
Chương trình Test sản phẩm
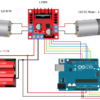
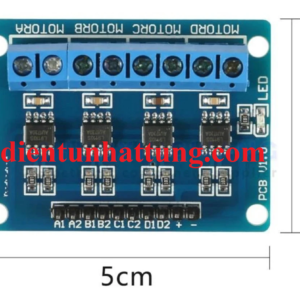
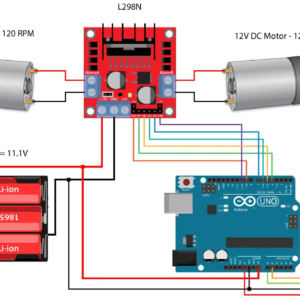
Nguyên lý kết nối
Chương trình
#define enA 9
#define in1 4
#define in2 5
#define enB 10
#define in3 6
#define in4 7
int motorSpeedA = 0;
int motorSpeedB = 0;
void setup() {
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
int xAxis = analogRead(A0); // Read Joysticks X-axis
int yAxis = analogRead(A1); // Read Joysticks Y-axis
// Y-axis used for forward and backward control
if (yAxis < 470) {
// Set Motor A backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Set Motor B backward
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Convert the declining Y-axis readings for going backward from 470 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 470, 0, 0, 255);
motorSpeedB = map(yAxis, 470, 0, 0, 255);
}
else if (yAxis > 550) {
// Set Motor A forward
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// Set Motor B forward
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// Convert the increasing Y-axis readings for going forward from 550 to 1023 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 550, 1023, 0, 255);
motorSpeedB = map(yAxis, 550, 1023, 0, 255);
}
// If joystick stays in middle the motors are not moving
else {
motorSpeedA = 0;
motorSpeedB = 0;
}
// X-axis used for left and right control
if (xAxis < 470) {
// Convert the declining X-axis readings from 470 to 0 into increasing 0 to 255 value
int xMapped = map(xAxis, 470, 0, 0, 255);
// Move to left - decrease left motor speed, increase right motor speed
motorSpeedA = motorSpeedA - xMapped;
motorSpeedB = motorSpeedB + xMapped;
// Confine the range from 0 to 255
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}
if (xAxis > 550) {
// Convert the increasing X-axis readings from 550 to 1023 into 0 to 255 value
int xMapped = map(xAxis, 550, 1023, 0, 255);
// Move right - decrease right motor speed, increase left motor speed
motorSpeedA = motorSpeedA + xMapped;
motorSpeedB = motorSpeedB - xMapped;
// Confine the range from 0 to 255
if (motorSpeedA > 255) {
motorSpeedA = 255;
}
if (motorSpeedB < 0) {
motorSpeedB = 0;
}
}
// Prevent buzzing at low speeds (Adjust according to your motors. My motors couldn't start moving if PWM value was below value of 70)
if (motorSpeedA < 70) {
motorSpeedA = 0;
}
if (motorSpeedB < 70) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); // Send PWM signal to motor A
analogWrite(enB, motorSpeedB); // Send PWM signal to motor B
}
Liên hệ làm mạch
- Phone: 0967.551.477
- Zalo: 0967.551.477
- Email: dientunhattung@gmail.com
- Chi tiết : Nhận làm mạch và hướng dẫn đồ án sinh viên
Tham khảo chương trình mẫu và thông tin linh kiện chi tiết tại:
Only logged in customers who have purchased this product may leave a review.
Related products

Driver DC & Step











Driver DC & Step
Reviews
There are no reviews yet.