







CẢM BIẾN GIA TỐC GÓC ADXL345 V2, GIA TỐC GÓC NGHIÊNG


40.000₫
Cảm biến gia tốc ADXL345 V2 là gia tốc kế ba trục nhỏ, mỏng, công suất thấp, cung cấp các phép đo gia tốc có độ phân giải cao (13 bit) lên tới ±16 g.
| Điện áp hoạt động: | |
| Dòng tiêu thụ: | |
| Công suất: | |
| Loại sản phẩm: | |
| Chuẩn giao tiếp: |
10 in stock
Giới thiệu cảm biến gia tốc ADXL345 V2
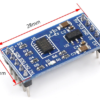
Cảm biến gia tốc ADXL345 V2 là gia tốc kế ba trục nhỏ, mỏng, công suất thấp, cung cấp các phép đo gia tốc có độ phân giải cao (13 bit) lên tới ±16 g. Dữ liệu đầu ra kỹ thuật số ở định dạng bổ sung hai bit 16 bit và có thể được truy cập thông qua giao diện kỹ thuật số SPI (3 dây hoặc 4 dây) hoặc I2C.
Cảm biến gia tốc này được ứng dụng trong nhiều lĩnh vực khác nhau như: hệ thống FPV, RC và Robot, hệ thống định vị GPS, thiết bị đầu vào trò chơi và thực tế ảo, giám sát và bù rung, phát hiện rơi tự do, phát hiện định hướng 6D,… thường được dùng để xác định hướng chuyển động và hướng từ trường của trái đất nhằm xác định phương hướng với độ chính xác cao.
Chức năng các chân cảm biến gia tốc ADXL345 V2
- GND: Chân cấp nguồn 0V
- Vcc : chân nguồn dương 3V – 6V
- CS : Lựa chọn chip
- INT1 : Chân ngắt 1
- INT2 : Chân ngắt 2
- SDO : Ngõ ra dữ liệu
- SDA : Chân dữ liệu I2C
- SCL : Chân tạo xung I2C
Thông số kỹ thuật cảm biến gia tốc ADXL345 V2
- Điện áp sử dụng: 3~5VDC
- Điện áp giao tiếp: 3~5VDC
- Chuẩn giao tiếp: I2C
- Số trục : 3 trường và 3 trục gia tốc
- Phạm vi của trường: ± 1.3 to ±8.1
- Phạm vi tăng tốc: ±2g/±4g/±8g/±16g
- Số bit output: 16 bit data output.
- Tính năng: Chế độ chờ
- Cảm biến tích hợp: Nhiệt độ nhúng
- Góc phát hiện: 6DOF
- Kích thước: 14 x 28mm
- Tên: Mô-đun ADXL345 (gia tốc trọng lực ba trục)
- Model: GY-291
- Chip sử dụng: ADXL345
- Phương thức giao tiếp: Giao thức truyền thông IIC/SPI
- Phạm vi đo: ±2g ± 16g
Một số ứng dụng
- Trò chơi cảm biến chuyển động
- Thực tế tăng cường
- Ổn định hình ảnh điện tử (EIS: Ổn định hình ảnh điện tử)
- Ổn định hình ảnh quang học (OIS: Ổn định hình ảnh quang học)
- Định hướng cho người đi bộ
- Giao diện người dùng cử chỉ “không chạm”
- Phím tắt tư thế
- Chứng nhận
- Điện thoại thông minh
- Thiết bị máy tính bảng
- Sản phẩm chơi game cầm tay
- Điều khiển từ xa 3D
- Thiết bị định vị di động
Tính năng
ADXL345 lý tưởng cho các ứng dụng thiết bị di động. Nó có thể đo gia tốc tĩnh do trọng lực trong các ứng dụng phát hiện độ nghiêng, cũng như gia tốc động do chuyển động hoặc va chạm gây ra. Nó có độ phân giải cao (4 mg/LSB) và có khả năng đo sự thay đổi độ nghiêng khoảng 0,25°.
Việc sử dụng gia tốc kế đầu ra kỹ thuật số như ADXL345 giúp loại bỏ nhu cầu chuyển đổi từ analog sang kỹ thuật số, tiết kiệm chi phí hệ thống và diện tích bo mạch.
ADXL345 lý tưởng cho các ứng dụng thiết bị di động. Nó có thể đo gia tốc tĩnh do trọng lực trong các ứng dụng phát hiện độ nghiêng, cũng như gia tốc động do chuyển động hoặc va chạm gây ra. Độ phân giải cao (3,9 mg/LSB) của nó có thể đo sự thay đổi góc nghiêng dưới 1,0°.
Thiết bị này cung cấp nhiều tính năng phát hiện đặc biệt. Phát hiện hoạt động và không hoạt động phát hiện sự hiện diện của chuyển động bằng cách so sánh gia tốc trên bất kỳ trục nào với ngưỡng do người dùng đặt. Chức năng phát hiện tiếng gõ có thể phát hiện các chuyển động rung đơn và kép theo bất kỳ hướng nào.
Chế độ năng lượng thấp hỗ trợ quản lý năng lượng dựa trên chuyển động thông minh, cho phép đo ngưỡng cảm biến và gia tốc chuyển động với mức tiêu thụ điện năng cực thấp.
Chương trình Test sản phẩm
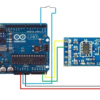
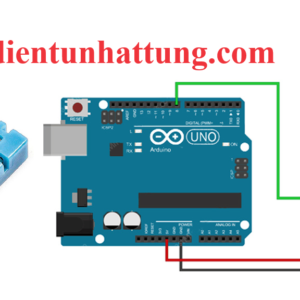
Nguyên lý kết nối
Chương trình
#include <Wire.h> // Wire library - used for I2C communication
int ADXL345 = 0x53; // The ADXL345 sensor I2C address
float X_out, Y_out, Z_out; // Outputs
void setup() {
Serial.begin(9600); // Initiate serial communication for printing the results on the Serial monitor
Wire.begin(); // Initiate the Wire library
// Set ADXL345 in measuring mode
Wire.beginTransmission(ADXL345); // Start communicating with the device
Wire.write(0x2D); // Access/ talk to POWER_CTL Register - 0x2D
// Enable measurement
Wire.write(8); // (8dec -> 0000 1000 binary) Bit D3 High for measuring enable
Wire.endTransmission();
delay(10);
}
void loop() {
// === Read acceleromter data === //
Wire.beginTransmission(ADXL345);
Wire.write(0x32); // Start with register 0x32 (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(ADXL345, 6, true); // Read 6 registers total, each axis value is stored in 2 registers
X_out = ( Wire.read()| Wire.read() << 8); // X-axis value
X_out = X_out/256; //For a range of +-2g, we need to divide the raw values by 256, according to the datasheet
Y_out = ( Wire.read()| Wire.read() << 8); // Y-axis value
Y_out = Y_out/256;
Z_out = ( Wire.read()| Wire.read() << 8); // Z-axis value
Z_out = Z_out/256;
Serial.print("Xa= ");
Serial.print(X_out);
Serial.print(" Ya= ");
Serial.print(Y_out);
Serial.print(" Za= ");
Serial.println(Z_out);
}
Liên hệ làm mạch
- Phone: 0967.551.477
- Zalo: 0967.551.477
- Email: dientunhattung@gmail.com
- Chi tiết : Nhận làm mạch và hướng dẫn đồ án sinh viên
Tham khảo chương trình mẫu và thông tin linh kiện chi tiết tại:
Only logged in customers who have purchased this product may leave a review.
Related products

CẢM BIẾN



CẢM BIẾN

CẢM BIẾN


CẢM BIẾN


Âm thanh


Reviews
There are no reviews yet.