










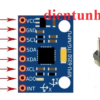

CẢM BIẾN MPU6050, GIA TỐC GÓC GY-61 6DOF IMU


50.000 ₫
Cảm biến MPU6050 là cảm biến gia tốc góc được sử dụng để đo 6 thông số: 3 trục Góc quay, 3 trục gia tốc hướng (Accelerometer).
| Điện áp hoạt động: | 3V - 5V |
| Dòng tiêu thụ: | 5mA |
| Công suất: | 25mW |
| Loại sản phẩm: | Module |
| Chuẩn giao tiếp: | I2C |
9 in stock
Giới thiệu cảm biến MPU6050 đo gia tốc góc
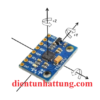
Cảm biến MPU6050 là cảm biến gia tốc góc được sử dụng để đo 6 thông số: 3 trục Góc quay, 3 trục gia tốc hướng (Accelerometer). So với các giải pháp đa thành phần, nó giúp loại bỏ vấn đề khác biệt giữa các trục khi kết hợp con quay hồi chuyển và máy gia tốc, đồng thời giảm lượng lớn không gian đóng gói.
MPU6050 tích hợp con quay hồi chuyển 3 trục, bộ gia tốc 3 trục và bao gồm khả năng tăng tốc phần cứng xử lý chuyển động kỹ thuật số (DMP: Bộ xử lý chuyển động kỹ thuật số) có thể được kết nối với gia tốc kế, cảm biến từ tính hoặc các cảm biến khác từ các thương hiệu khác thông qua cổng I2C thứ hai Động cơ xuất công nghệ tính toán tổng hợp 9 trục hoàn chỉnh đến đầu ứng dụng dưới dạng một luồng dữ liệu duy nhất thông qua cổng I2C chính.
Chức năng các chân
- Vcc : chân nguồn dương 5V
- GND : Chân cấp nguồn 0V
- SCL : Chân tạo xung chuẩn I2C
- SDA : Chân dữ liệu chuẩn I2C
Thông số kỹ thuật cảm biến MPU6050
- Điện áp sử dụng: 3~5VDC
- Điện áp giao tiếp: 3~5VDC
- Dòng điện giao tiếp: 5mA
- Chuẩn giao tiếp: I2C
- Tần số I2C: 400KHz
- Giá trị Gyroscopes trong khoảng: +/- 250 500 1000 2000 degree/sec
- Giá trị Acceleration trong khoảng: +/- 2g, +/- 4g, +/- 8g, +/- 16g
- Board mạch mạ vàng, linh kiện hàn tự động bằng máy chất lượng tốt nhất.
- Chip tích hợp bộ chuyển đổi AD 16bit, đầu ra dữ liệu 16bit
- Kích thước : 16mm * 20mm
Một số ứng dụng
- trò chơi cảm biến chuyển động
- thực tế tăng cường
- Ổn định hình ảnh điện tử (EIS: Ổn định hình ảnh điện tử)
- Ổn định hình ảnh quang học (OIS: Ổn định hình ảnh quang học)
- định hướng cho người đi bộ
- Giao diện người dùng cử chỉ “không chạm”
- Phím tắt tư thế
- Chứng nhận
- điện thoại thông minh
- Thiết bị máy tính bảng
- Sản phẩm chơi game cầm tay
- điều khiển từ xa 3D
- thiết bị định vị di động
Tính năng
- Xuất ra kỹ thuật số dữ liệu tính toán tổng hợp ma trận xoay 6 trục hoặc 9 trục, quaternion và định dạng Góc Euler (định dạng Góc Euler).
- Cảm biến vận tốc góc 3 trục (con quay hồi chuyển) có độ nhạy 131 LSB/°/giây và phạm vi cảm biến đầy đủ là ±250, ±500, ±1000 và ±2000°/giây.
- Nó là máy gia tốc 3 trục với phạm vi điều khiển có thể lập trình là ±2g, ±4g, ±8g và ±16g.
- Loại bỏ độ nhạy giữa trục gia tốc kế và trục con quay hồi chuyển, giảm tác động của cài đặt và độ lệch cảm biến.
- Công cụ DMP (Xử lý chuyển động kỹ thuật số) có thể giảm tải dữ liệu tính toán tổng hợp phức tạp, đồng bộ hóa cảm biến, cảm biến cử chỉ, v.v.
- Cơ sở dữ liệu xử lý chuyển động hỗ trợ Android, Linux và Windows
- Công nghệ tính toán hiệu chuẩn cảm biến từ và độ lệch thời gian vận hành tích hợp giúp khách hàng không cần thực hiện hiệu chuẩn bổ sung.
- Cảm biến nhiệt độ với đầu ra kỹ thuật số
- Chân đồng bộ đầu vào kỹ thuật số hỗ trợ công nghệ ổn định hình ảnh điện tử video và GPS
- Ngắt có thể lập trình hỗ trợ nhận dạng cử chỉ, xoay, thu phóng màn hình, cuộn, ngắt giảm nhanh, ngắt G cao, cảm biến chuyển động bằng không, cảm biến chạm và chức năng cảm biến rung.
- Bộ tạo tần số tích hợp chỉ có sự thay đổi tần số ± 1% trên toàn bộ phạm vi nhiệt độ.
- Được thử nghiệm bởi chính người dùng
- Khả năng chịu va đập 10.000g
- Tuân thủ các tiêu chuẩn RoHS và môi trường
Chương trình Test sản phẩm
Nguyên lý kết nối
Chương trình
Thư viện : Adafruit_MPU6050.h Hoặc tải trực tiếp từ Arduino IDE với tên Adafruit_MPU6050
Thư viện : Adafruit_Sensor.h Hoặc tải trực tiếp từ Arduino IDE với tên Adafruit_Sensor
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
Adafruit_MPU6050 mpu;
void setup(void) {
Serial.begin(115200);
// Try to initialize!
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
// set accelerometer range to +-8G
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
// set gyro range to +- 500 deg/s
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
// set filter bandwidth to 21 Hz
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
delay(100);
}
void loop() {
/* Get new sensor events with the readings */
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
/* Print out the readings */
Serial.print("Acceleration X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("Rotation X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println(" degC");
Serial.println("");
delay(1000);
}
Liên hệ làm mạch
- Phone: 0967.551.477
- Zalo: 0967.551.477
- Email: dientunhattung@gmail.com
- Chi tiết : Nhận làm mạch và hướng dẫn đồ án sinh viên
Tham khảo chương trình mẫu và thông tin linh kiện chi tiết tại:
Only logged in customers who have purchased this product may leave a review.
Related products






CẢM BIẾN





Âm thanh

CẢM BIẾN
Reviews
There are no reviews yet.