











CẢM BIẾN RADAR VL53L0X, ĐO KHOẢNG CÁCH GY-350


48.000 ₫
Cảm biến Radar VL53L0X có các chức năng nhanh hơn, xa hơn và chính xác hơn, cải thiện đáng kể điện thoại di động và máy tính bảng.
| Điện áp hoạt động: | 2.8V - 5V |
| Dòng tiêu thụ: | 20mA |
| Công suất: | 100mW |
| Loại sản phẩm: | Module |
| Chuẩn giao tiếp: | I2C |
20 in stock
Giới thiệu cảm biến radar VL53L0X đo khoảng cách
Cảm biến Radar VL53L0X có các chức năng nhanh hơn, xa hơn và chính xác hơn, cải thiện đáng kể điện thoại di động và máy tính bảng. Hiệu suất máy ảnh mở ra các ứng dụng mới cho robot thông minh, phát hiện người dùng, máy bay không người lái, Internet of Things và các thiết bị đeo được.
VL53L0X có khả năng miễn dịch ánh sáng xung quanh tốt nhất trong ngành, giảm thiểu tác động của ánh sáng xung quanh.
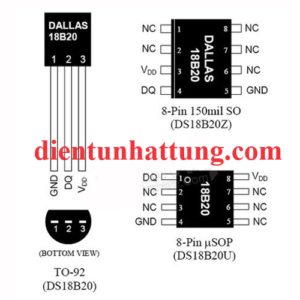
Chức năng các chân
- Vcc: chân nguồn dương VCC cấp nguồn từ 5VDC.
- GND: Chân cấp nguồn 0V
- SCL: Chân tạo xung chuẩn I2C.
- SDA: Chân nhận tín hiệu chuẩn I2C.
- GPIO1: Chân không kết nối.
- XSHUT: Chân không kết nối.
Thông số kỹ thuật cảm biến radar VL53L0X
- Model: ToF Laser Radar VL53L0/1XV2
- Điện áp sử dụng: 2.8~5VDC
- Dòng sử dụng trung bình: lúc hoạt động 20mA, lúc nghỉ 6uA.
- Phương pháp đo khoảng cách: Tia Laser.
- Khoảng cách đo trung bình: Tối thiểu: 2cm.
- Trong nhà: Nền màu trắng: 200cm+, các màu khác: 80cm.
- Ngoài trời: Nền màu trắng: 80cm, các màu khác: 50cm.
- Dạng tín hiệu trả về: I2C mức TTL 3.3~5VDC.
- Kích thước: 10.5 x 13.3 mm
Các tính năng của cảm biến VL53L0X
VL53L0X có khả năng thực hiện tất cả các hoạt động đo trong một khung hình, thường là dưới 30ms và dưới 2 mét. Hiệu suất khác nhau này cho phép hệ thống camera lấy nét ngay lập tức trong máy ảnh và các chế độ chụp liên tục, ngay cả trong các cảnh thiếu sáng hoặc tương phản thấp, trong khi đối với các cảnh thiếu sáng hoặc tương phản thấp mà không có hệ thống camera dựa trên ToF
Nhờ độ chính xác phạm vi tuyệt vời của nó, VL53L0 cũng tăng cường hiệu suất ứng dụng điện thoại thông minh, bao gồm cả bản đồ độ sâu camera kép. Mô-đun VL53L0 của ST rất dễ sử dụng (6 chân hoạt động), cung cấp giao diện I2C và được trang bị đầy đủ trình điều khiển API và tài liệu kỹ thuật để tích hợp hệ thống nhanh chóng và dễ dàng
Chương trình Test sản phẩm cảm biến khoảng cách
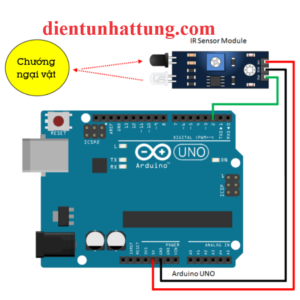
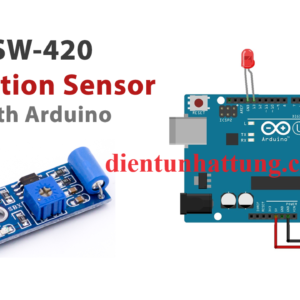
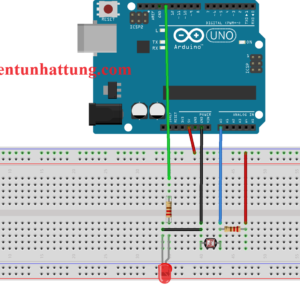
Nguyên lý kết nối
Chương trình
Thư viện : VL53L0X.h
/*
Kết nối:
VL530X Uno Mega
* GND GND GND
* VCC 5V 5V
* SCL A5 SCL
* SDA A4 SDA
*/
#include <Wire.h>
#include <VL53L0X.h>
VL53L0X sensor1;
void setup()
{
Serial.begin(9600);
Wire.begin();
sensor1.setTimeout(500);
if (!sensor1.init())
{
Serial.println("Failed to detect and initialize sensor!");
while (1) {}
}
#if defined LONG_RANGE
sensor1.setSignalRateLimit(0.1);
sensor1.setVcselPulsePeriod(VL53L0X::VcselPeriodPreRange, 18);
sensor1.setVcselPulsePeriod(VL53L0X::VcselPeriodFinalRange, 14);
#endif
#if defined HIGH_SPEED
sensor1.setMeasurementTimingBudget(20000);
#elif defined HIGH_ACCURACY
sensor1.setMeasurementTimingBudget(200000);
#endif
}
void loop()
{
Serial.print(sensor1.readRangeSingleMillimeters());
if (sensor1.timeoutOccurred()) { Serial.print(" TIMEOUT"); }
Serial.println();
}
Liên hệ làm mạch
- Phone: 0967.551.477
- Zalo: 0967.551.477
- Chi tiết : Nhận làm mạch và hướng dẫn đồ án sinh viên
Tham khảo chương trình mẫu và thông tin linh kiện chi tiết tại:
Only logged in customers who have purchased this product may leave a review.
Related products

CẢM BIẾN




CẢM BIẾN

Âm thanh



Reviews
There are no reviews yet.