









CẢM BIẾN VÂN TAY AS608, CẢM BIẾN NHẬN DẠNG VÂN TAY


240.000₫
Cảm biến nhận dạng vân tay sử dụng giao tiếp UART TTL hoặc USB 1.1 để giao tiếp với Vi điều khiển hoặc kết nối trực tiếp với máy tính
| Điện áp hoạt động: | 3.3V - 3.6V |
| Dòng tiêu thụ: | 60mA |
| Công suất: | 200mW |
| Loại sản phẩm: | Module |
| Chuẩn giao tiếp: | UART / USART, USB |
5 in stock
Giới thiệu cảm biến vân tay AS608
Cảm biến vân tay AS608 dùng nhận dạng vân tay sử dụng giao tiếp UART TTL hoặc USB 1.1 để giao tiếp với Vi điều khiển hoặc kết nối trực tiếp với máy tính (thông qua mạch chuyển USB-UART hoặc giao tiếp USB 1.1). Cảm biến nhận dạng vân tay được tích hợp nhân xử lý nhận dạng vân tay phía trong, tự động gán vân tay với 1 chuỗi data và truyền qua giao tiếp UART ra ngoài nên hoàn toàn không cần các thao tác xử lý hình ảnh, đơn giản chỉ là phát lệnh đọc/ghi và so sánh chuỗi UART nên rất dễ sử dụng và lập trình. Cảm biến nhận dạng vân tay có khả năng lưu nhiều vân tay cho 1 ID (1 người), thích hợp cho các ứng dụng bảo mật, khóa cửa, sinh trắc học,… Khu vực ứng dụng: Mô-đun vân tay được sử dụng rộng rãi, phù hợp với tất cả các hệ thống nhận dạng vân tay từ cao cấp đến thấp cấp.
Thông số kỹ thuật cảm biến vân tay AS608
- Điện áp sử dụng: 3.0~3.6VDC (thường cấp 3.3VDC, lưu ý quan trọng nếu cấp lớn hơn 3.3VDC cảm biến sẽ cháy ngay lập tức).
- Dòng tiêu thụ: 30~60mA, trung bình 40mA
- Phương thức giao tiếp:: USB /UART
- Mức độ an toàn: 5
- Tốc độ Baudrate UART: 9600 x N (N từ 1~12), mặc định N=6 baudrate = 57600,8,1.
- Tốc độ giao tiếp UART : 2.0 full speed
- Kích thước ảnh (pixel): 256 x 288 pixels
- Thời gian xử lý (s): <0.4s
- Độ trễ (s): <0.1s
- Thời gian làm việc (s): <0.3s
- Tỉ lệ chấp nhận sai (FAR): <0.001% (mức bảo mật 3)
- Tỉ lệ từ chối sai (FRR): <1.0% (mức bảo mật 3)
- Dung lượng lưu trữ vân tay: 300 (ID: 0 ~ 299)
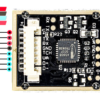
Chức năng chân:
- V+: chân cấp nguồn chính VCC 3.3VDC cho cảm biến hoạt động.
- Tx: Chân giao tiếp UART TTL TX
- Rx: Chân giao tiếp UART TTL RX
- GND: Chân cấp nguồn GND (Mass / 0VDC)
- TCH: Chân Output của cảm biến chạm Touch, khi chạm tay vào cảm biến chân này sẽ xuất ra mức cao High, để sử dụng tính năng này cần cấp nguồn 3.3VDC cho chân Va
- VA: Chân cấp nguồn 3.3VDC cho Touch Sensor.
- U+: Chân tín hiệu USB D+
- U-: Chân tín hiệu USB D-
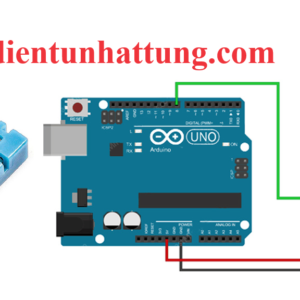
Để giao tiếp UART ta cần sử dụng các chân:
- V+: Cấp nguồn 3.3VDC
- Tx: nối với RX của Vi điều kiển (mức TTL từ 3.3~5VDC)
- Rx: nối với TX của Vi điều kiển (mức TTL từ 3.3~5VDC)
- GND: Cấp nguồn GND (Mass chung)
Để giao tiếp USB ta cần sử dụng các chân:
- V+: Cấp nguồn 3.3VDC
- U+: Chân tín hiệu USB D+
- U-: Chân tín hiệu USB D-
- GND: Cấp nguồn GND (Mass chung).
Một số ứng dụng
- Khóa vân tay, két sắt, hộp súng, tài chính và các khu vực an ninh khác;
- Các lĩnh vực nhận dạng như hệ thống kiểm soát truy cập, IPC, máy POS , đào tạo lái xe và tham dự;
- Các khu vực quản lý như câu lạc bộ tư nhân, phần mềm quản lý và cấp phép.
Chương trình
Nguyên lý#include <Adafruit_Fingerprint.h>
SoftwareSerial mySerial(2, 3); // TX/RX
Adafruit_Fingerprint finger = Adafruit_Fingerprint(&mySerial);
uint8_t id;
void setup()
{
Serial.begin(9600);
while (!Serial); // For Yun/Leo/Micro/Zero/...
delay(100);
Serial.println("\n\nAdafruit Fingerprint sensor enrollment");
// set the data rate for the sensor serial port
finger.begin(57600);
if (finger.verifyPassword()) {
Serial.println("Found fingerprint sensor!");
} else {
Serial.println("Did not find fingerprint sensor :(");
while (1) { delay(1); }
}
}
uint8_t readnumber(void) {
uint8_t num = 0;
while (num == 0) {
while (! Serial.available());
num = Serial.parseInt();
}
return num;
}
void loop() // run over and over again
{
Serial.println("Ready to enroll a fingerprint!");
Serial.println("Please type in the ID # (from 1 to 127) you want to save this finger as...");
id = readnumber();
if (id == 0) {// ID #0 not allowed, try again!
return;
}
Serial.print("Enrolling ID #");
Serial.println(id);
while (! getFingerprintEnroll() );
}
uint8_t getFingerprintEnroll() {
int p = -1;
Serial.print("Waiting for valid finger to enroll as #"); Serial.println(id);
while (p != FINGERPRINT_OK) {
p = finger.getImage();
switch (p) {
case FINGERPRINT_OK:
Serial.println("Image taken");
break;
case FINGERPRINT_NOFINGER:
break;
case FINGERPRINT_PACKETRECIEVEERR:
Serial.println("Communication error");
break;
case FINGERPRINT_IMAGEFAIL:
Serial.println("Imaging error");
break;
default:
Serial.println("Unknown error");
break;
}
}
// OK success!
p = finger.image2Tz(1);
switch (p) {
case FINGERPRINT_OK:
Serial.println("Image converted");
break;
case FINGERPRINT_IMAGEMESS:
Serial.println("Image too messy");
return p;
case FINGERPRINT_PACKETRECIEVEERR:
Serial.println("Communication error");
return p;
case FINGERPRINT_FEATUREFAIL:
Serial.println("Could not find fingerprint features");
return p;
case FINGERPRINT_INVALIDIMAGE:
Serial.println("Could not find fingerprint features");
return p;
default:
Serial.println("Unknown error");
return p;
}
Serial.println("Remove finger");
delay(2000);
p = 0;
while (p != FINGERPRINT_NOFINGER) {
p = finger.getImage();
}
Serial.print("ID "); Serial.println(id);
p = -1;
Serial.println("Place same finger again");
while (p != FINGERPRINT_OK) {
p = finger.getImage();
switch (p) {
case FINGERPRINT_OK:
Serial.println("Image taken");
break;
case FINGERPRINT_NOFINGER:
break;
case FINGERPRINT_PACKETRECIEVEERR:
Serial.println("Communication error");
break;
case FINGERPRINT_IMAGEFAIL:
Serial.println("Imaging error");
break;
default:
Serial.println("Unknown error");
break;
}
}
// OK success!
p = finger.image2Tz(2);
switch (p) {
case FINGERPRINT_OK:
Serial.println("Image converted");
break;
case FINGERPRINT_IMAGEMESS:
Serial.println("Image too messy");
return p;
case FINGERPRINT_PACKETRECIEVEERR:
Serial.println("Communication error");
return p;
case FINGERPRINT_FEATUREFAIL:
Serial.println("Could not find fingerprint features");
return p;
case FINGERPRINT_INVALIDIMAGE:
Serial.println("Could not find fingerprint features");
return p;
default:
Serial.println("Unknown error");
return p;
}
// OK converted!
Serial.print("Creating model for #"); Serial.println(id);
p = finger.createModel();
if (p == FINGERPRINT_OK) {
Serial.println("Prints matched!");
} else if (p == FINGERPRINT_PACKETRECIEVEERR) {
Serial.println("Communication error");
return p;
} else if (p == FINGERPRINT_ENROLLMISMATCH) {
Serial.println("Fingerprints did not match");
return p;
} else {
Serial.println("Unknown error");
return p;
}
Serial.print("ID "); Serial.println(id);
p = finger.storeModel(id);
if (p == FINGERPRINT_OK) {
Serial.println("Stored!");
} else if (p == FINGERPRINT_PACKETRECIEVEERR) {
Serial.println("Communication error");
return p;
} else if (p == FINGERPRINT_BADLOCATION) {
Serial.println("Could not store in that location");
return p;
} else if (p == FINGERPRINT_FLASHERR) {
Serial.println("Error writing to flash");
return p;
} else {
Serial.println("Unknown error");
return p;
}
}
Chương trình kiểm tra
#include <Adafruit_Fingerprint.h>
const int led_pin_accept = 8;
const int led_pin_deny = 9;
volatile int finger_status = -1;
SoftwareSerial mySerial(2, 3); // TX/RX on fingerprint sensor
Adafruit_Fingerprint finger = Adafruit_Fingerprint(&mySerial);
void setup()
{
Serial.begin(9600);
pinMode(led_pin_accept,OUTPUT);
pinMode(led_pin_deny,OUTPUT);
while (!Serial); // For Yun/Leo/Micro/Zero/...
delay(100);
Serial.println("\n\nAdafruit finger detect test");
// set the data rate for the sensor serial port
finger.begin(57600);
if (finger.verifyPassword()) {
Serial.println("Found fingerprint sensor!");
} else {
Serial.println("Did not find fingerprint sensor :(");
while (1) { delay(1); }
}
finger.getTemplateCount();
Serial.print("Sensor contains "); Serial.print(finger.templateCount); Serial.println(" templates");
Serial.println("Waiting for valid finger...");
}
void loop() // run over and over again
{
finger_status = getFingerprintIDez();
if (finger_status!=-1 and finger_status!=-2){
digitalWrite(led_pin_accept,HIGH);
delay(1000);
} else{
if (finger_status==-2){
for (int ii=0;ii<5;ii++){
digitalWrite(led_pin_deny,HIGH);
delay(50);
digitalWrite(led_pin_deny,LOW);
delay(50);
}
}
digitalWrite(led_pin_accept,LOW);
}
delay(50); //don't ned to run this at full speed.
}
// returns -1 if failed, otherwise returns ID #
int getFingerprintIDez() {
uint8_t p = finger.getImage();
if (p!=2){
Serial.println(p);
}
if (p != FINGERPRINT_OK) return -1;
p = finger.image2Tz();
if (p!=2){
Serial.println(p);
}
if (p != FINGERPRINT_OK) return -1;
p = finger.fingerFastSearch();
if (p != FINGERPRINT_OK) return -2;
// found a match!
Serial.print("Found ID #"); Serial.print(finger.fingerID);
Serial.print(" with confidence of "); Serial.println(finger.confidence);
return finger.fingerID;
}
Liên hệ làm mạch
- Phone: 0967.551.477
- Zalo: 0967.551.477
- Email: dientunhattung@gmail.com
- Chi tiết : Nhận làm mạch và hướng dẫn đồ án sinh viên
Tham khảo chương trình mẫu và thông tin linh kiện chi tiết tại:
Only logged in customers who have purchased this product may leave a review.
Related products



CẢM BIẾN


CẢM BIẾN






Reviews
There are no reviews yet.