













ĐỘNG CƠ ENCODER GB37-520 12V 176RPM, DC GIẢM TỐC


200.000 ₫
Động cơ encoder GB37-520 12V 176RPM thực tế là động cơ DC JGY thường có gắn thêm phần Encoder để trả xung về vi điều khiển giúp xác định vị trí, vận tốc
| Điện áp hoạt động: | 12V |
| Dòng tiêu thụ: | 100mA |
| Công suất: | 3W |
| Loại sản phẩm: | Module |
| Chuẩn giao tiếp: | Digital (D0) |
5 in stock
Giới thiệu động cơ encoder GB37-520 12V 60RPM
Động cơ encoder GB37-520 12V 60RPM thực tế là động cơ DC JGY thường có gắn thêm phần Encoder để trả xung về vi điều khiển giúp xác định vị trí, vận tốc,… và thành Động cơ DC giảm tốc
Động cơ encoder GB37-520 12V 60RPM thường được sử dụng trong các ứng dụng cần xác định tốc độ, vị trí, chiều quay của động cơ DC: Robot mê cung, robot xe hai bánh tự cân bằng,…
Thông số cơ bản động cơ :
- Mode: JGB37-520
- Điện áp cấp cho động cơ hoạt động: 12VDC
- Điện áp cấp cho Encoder hoạt động: 3.3VDC – 5VDC
- Dòng điện không tải: 100mA
- Dòng chịu đựng tối đa khi có tải: 1A
- Công suất: 3W
- Tỉ số truyền: 30:1 (động cơ quay 40 vòng trục chính hộp giảm tốc quay 1 vòng).
- Tốc độ động cơ chưa giảm tốc: 6 – 2000RPM
- Tốc độ sau giảm tốc: 176RPM
- Tốc độ chịu đựng tối đa khi có tải: 150RPM
- Lực kéo Moment định mức: 6KG.CM
- Lực léo Moment tối đa: 6.5KG.CM
- Số xung Encoder mỗi kênh trên 1 vòng quay trục chính: 11 x 30 = 330 xung.
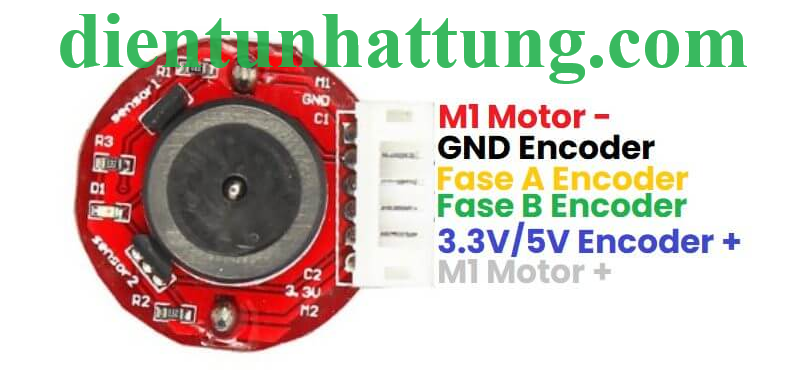
- Đĩa Encoder: hai kênh A-B
- Loại trục: Chữ D
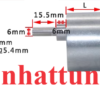
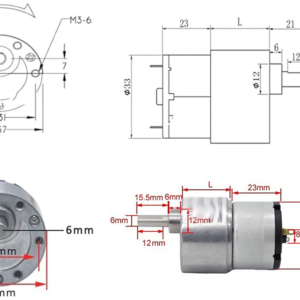
- Đường kính động cơ: 25mm
- Đường kính trục: 4mm
- Trọng lượng: 150g
- Kích thước: 50mm * 24mm
Nguyên lý hoạt động động cơ encoder GB37-520 12V 176RPM
Encoder hoạt động theo nguyên lý đĩa quay quanh trục. Trên đĩa mã hóa có các rãnh nhỏ để nguồn phát sáng chiếu tín hiệu quang qua đĩa. Chỗ có rãnh thì ánh sáng xuyên qua được, chỗ không có rãnh ánh sáng không xuyên qua được.
Với các tín hiệu có, hoặc không có ánh sáng chiếu qua, người ta ghi nhận được đèn led có chiếu qua lỗ hay không. Số xung đếm được và tăng lên được tính bằng số lần ánh sáng bị cắt.
Cảm biến thu ánh sáng sẽ bật tắt liên tục để tạo ra các xung vuông. Việc sử dụng các bộ mã hóa sẽ ghi nhận lại số xung và tốc độ xung. Tín hiệu dạng xung sẽ được truyền về bộ xử lý trung tâm (vi xử lý, PLC,…) và từ đó kỹ sư cơ khí sẽ biết được vị trí và tốc độ của động cơ.
Chương trình Test sản phẩm
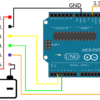
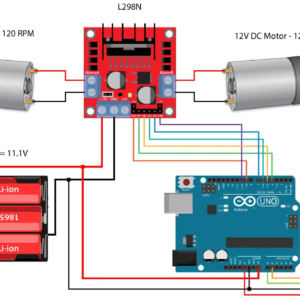
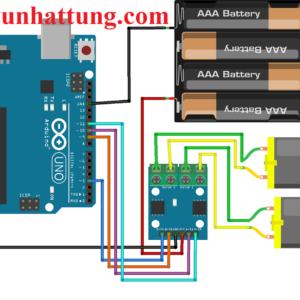
Nguyên lý kết nối
Chương trình
int encoderPin1 = 2;
int encoderPin2 = 3;
volatile int lastEncoded = 0;
volatile long encoderValue = 0;
volatile long correctEncoderValue =0;
long lastencoderValue = 0;
int lastMSB = 0;
int lastLSB = 0;
void setup() {
Serial.begin (9600);
pinMode(encoderPin1, INPUT);
pinMode(encoderPin2, INPUT);
attachInterrupt(1,updateEncoder,RISING);
}
void loop() {
correctEncoderValue = encoderValue;
Serial.println(correctEncoderValue);
delay(100);
}
void updateEncoder(){
int MSB = digitalRead(encoderPin2); //MSB = most significant bit
if(MSB==1) encoderValue ++;
if((MSB==0) encoderValue --;
lastEncoded = encoded; //store this value for next time
}
Liên hệ làm mạch
- Phone: 0967.551.477
- Zalo: 0967.551.477
- Email: dientunhattung@gmail.com
- Chi tiết : Nhận làm mạch và hướng dẫn đồ án sinh viên
Tham khảo chương trình mẫu và thông tin linh kiện chi tiết tại:
Only logged in customers who have purchased this product may leave a review.
Related products


Driver DC & Step







Driver DC & Step

Driver DC & Step

Driver DC & Step
Reviews
There are no reviews yet.