

-
×
 CẢM BIẾN KHỐI LƯỢNG LOADCELL 5KG, ĐO KHỐI LƯỢNG
1 × 55.000 ₫
CẢM BIẾN KHỐI LƯỢNG LOADCELL 5KG, ĐO KHỐI LƯỢNG
1 × 55.000 ₫
Subtotal: 55.000 ₫








92.000 ₫
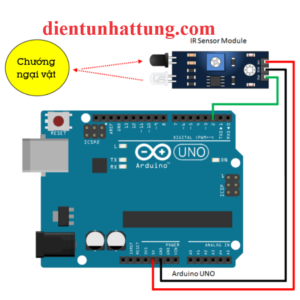
cảm biến siêu âm chống nước JSN-SRF04 được dùng trong các ứng dụng cần xác định khoảng cách, vật cản, dễ lắp đặt lên thân xe, robot, bồn chứa,…
| Điện áp hoạt động: | 5V |
| Dòng tiêu thụ: | 8mA |
| Công suất: | 40mW |
| Loại sản phẩm: | Module |
| Chuẩn giao tiếp: | Tạo xung hoặc UART |
5 in stock
cảm biến siêu âm chống nước JSN-SRF04 có thể cung cấp chức năng cảm biến khoảng cách không tiếp xúc 20cm-600cm, độ chính xác lên đến 2mm, mô-đun bao gồm bộ cảm biến siêu âm và mạch điều khiển thu phát.
Cảm biến siêu âm đo khoảng cách khoảng cách xa, thông qua thiết kế thăm dò siêu âm thích hợp công nghiệp, chống thấm nước, hiệu suất ổn định cao và tiết kiệm. Mô-đun chính xác cao, vùng mù (20cm), đo khoảng cách ổn định là cơ sở vững chắc cho sự thành công của cảm biến này ra thị trường.
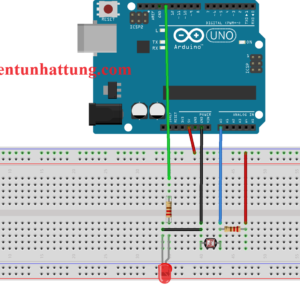
Để đo khoảng cách, ta sẽ phát 1 xung rất ngắn (5 microSeconds) từ chân Trig. Sau đó, cảm biến siêu âm sẽ tạo ra 1 xung HIGH ở chân Echo cho đến khi nhận lại được sóng phản xạ ở pin này. Chiều rộng của xung sẽ bằng với thời gian sóng siêu âm được phát từ cảm biển và quay trở lại.
Tốc độ của âm thanh trong không khí là 340 m/s (hằng số vật lý), tương đương với 29,412 microSeconds/cm (106 / (340*100)). Khi đã tính được thời gian, ta sẽ chia cho 29,412 để nhận được khoảng cách.
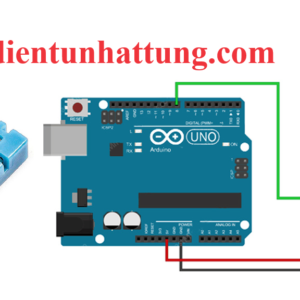
Nguyên lý kết nối
Chương trình
/* Example code for HC-SR04 ultrasonic distance sensor with Arduino.
No library required. More info: https://www.makerguides.com */
// Define Trig and Echo pin:
#define trigPin 2
#define echoPin 3
// Define variables:
long duration;
int distance;
void setup() {
// Define inputs and outputs:
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
//Begin Serial communication at a baudrate of 9600:
Serial.begin(9600);
}
void loop() {
// Clear the trigPin by setting it LOW:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
// Trigger the sensor by setting the trigPin high for 10 microseconds:
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the echoPin, pulseIn() returns the duration (length of the pulse) in microseconds:
duration = pulseIn(echoPin, HIGH);
// Calculate the distance:
distance = duration * 0.034 / 2;
// Print the distance on the Serial Monitor (Ctrl+Shift+M):
Serial.print("Distance = ");
Serial.print(distance);
Serial.println(" cm");
delay(50);
}
Liên hệ làm mạch
Tham khảo chương trình mẫu và thông tin linh kiện chi tiết tại:
Only logged in customers who have purchased this product may leave a review.

CẢM BIẾN



CẢM BIẾN

CẢM BIẾN
CẢM BIẾN


CẢM BIẾN






Reviews
There are no reviews yet.