

-
×
 QUANG TRỞ 4 CHÂN, CẢM BIẾN ÁNH SÁNG
1 × 12.000 ₫
QUANG TRỞ 4 CHÂN, CẢM BIẾN ÁNH SÁNG
1 × 12.000 ₫ -
×
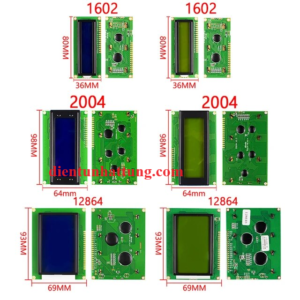
 LCD2004 I2C XANH LÁ, MÀN HÌNH HIỂN THỊ TEXT
1 × 82.000 ₫
LCD2004 I2C XANH LÁ, MÀN HÌNH HIỂN THỊ TEXT
1 × 82.000 ₫ -
×
 IC 7915 ỔN ÁP, NGÕ RA ĐIỆN ÁP ÂM 15V - LOẠI TRUNG
1 × 7.000 ₫
IC 7915 ỔN ÁP, NGÕ RA ĐIỆN ÁP ÂM 15V - LOẠI TRUNG
1 × 7.000 ₫
Subtotal: 101.000 ₫
























Reviews
There are no reviews yet.