

-
×
 Pic16F914 DÁN SMD, VI ĐIỀU KHIỂN HỌ PIC CỦA MICROCHIP
1 × 65.000 ₫
Pic16F914 DÁN SMD, VI ĐIỀU KHIỂN HỌ PIC CỦA MICROCHIP
1 × 65.000 ₫
Subtotal: 65.000 ₫







25.000 ₫
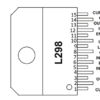
IC điều khiển động cơ L298 ( mạch cầu H L298) là một ic hưu ích, phổ biến với chức năng thông dụng và giá thành cực kỳ rẻ là lựa chọn của các bạn học sinh, sinh viên
| Điện áp hoạt động: | 5V - 46V |
| Dòng tiêu thụ: | 2A |
| Công suất: | 92W |
| Loại sản phẩm: | IC Rời |
| Chuẩn giao tiếp: | Digital (D0) |
3 in stock
IC điều khiển động cơ L298 ( mạch cầu H L298) là một ic hưu ích, phổ biến với chức năng thông dụng và giá thành cực kỳ rẻ là lựa chọn của các bạn học sinh, sinh viên. IC này có thể điều khiển được 2 động cơ.
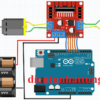
Ứng dụng rất nhiều vào các đề tài: điều khiển xe robot, điều khiển cánh tay robot (Cánh tay robot 3 bậc bạn phải sử dụng tới 2 mô đun này), Arduino để điều khiển động cơ sử dụng mô đun điều khiển động cơ…
IC l298 điều khiển được các động cơ như motor giảm tốc, motor mini, động cơ bước, động cơ servo, động cơ dc
Ngoài điều khiển động cơ l298 điều khiển được các tải DC từ 46V và dòng 2A trở xuống như bóng đèn, trở nhiệt, máy bơm giúp hệ thống chống nhiễu được tốt hơn.
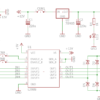
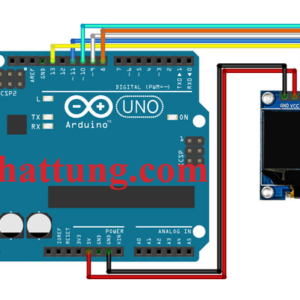
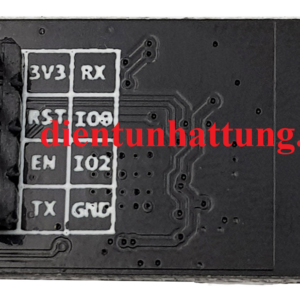
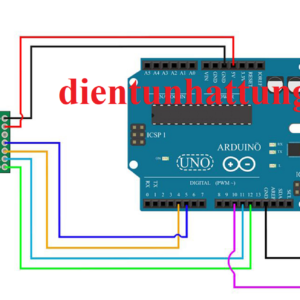
Nguyên lý kết nối
Chương trình
int ENA = 10;
int IN1 = 9;
int IN2 = 8;
int IN3 = 7;
int IN4 = 6;
int ENB = 5;
void setup() {
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
void loop() {
setDirection();
delay(1000);
changeSpeed();
delay(1000);
}
void setDirection() {
analogWrite(ENA, 255);
analogWrite(ENB, 255);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(5000);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(5000);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
void changeSpeed() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
for (int i = 0; i < 256; i++) {
analogWrite(ENA, i);
analogWrite(ENB, i);
delay(20);
}
for (int i = 255; i >= 0; --i) {
analogWrite(ENA, i);
analogWrite(ENB, i);
delay(20);
}
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
Liên hệ làm mạch
Tham khảo chương trình mẫu và thông tin linh kiện chi tiết tại:
Only logged in customers who have purchased this product may leave a review.

Màn hình LCD & OLED

MODULE VÀ MẠCH ĐIỆN

Bàn phím & Joystick

Bàn phím & Joystick

MODULE VÀ MẠCH ĐIỆN

Bàn phím & Joystick

MODULE VÀ MẠCH ĐIỆN

MODULE VÀ MẠCH ĐIỆN





Reviews
There are no reviews yet.